Robots used to move like they had skipped leg day forever: stiff joints, buzzing motors, awkward pauses, and the graceful flexibility of a filing cabinet. But a new generation of artificial muscle technology is changing that picture. At the center of this shift is the electromagnetic actuator, a device that converts electrical energy into motion through magnetic fields. In plain English, it is a tiny motion-making machine that can push, pull, contract, release, vibrate, bend, or snap into placeoften with the speed and precision engineers dream about after too much coffee.
The phrase “electromagnetic actuator mimics muscle” describes a fast-growing idea in robotics: instead of building machines that move only through rigid motors and gears, engineers are designing actuators that behave more like biological muscles. They contract, relax, store energy, respond quickly, and sometimes even work inside soft materials that bend naturally around objects. This matters because the future of robotics is not just about stronger machines. It is about machines that can safely interact with humans, handle delicate objects, fit into wearable devices, assist mobility, and operate in tight spaces where traditional motors are too bulky or too rigid.
From soft robotic grippers to haptic gloves, micro-robots, prosthetic systems, medical devices, and compact wearable technology, muscle-like actuators are becoming one of the most exciting frontiers in engineering. The goal is simple to say and difficult to achieve: build an artificial muscle that is strong, fast, efficient, quiet, lightweight, controllable, durable, and affordable. In other words, engineers are trying to copy nature’s masterpiece without making a robot that needs a protein shake.
What Is an Electromagnetic Actuator?
An electromagnetic actuator is a device that produces movement using electricity and magnetism. When electric current flows through a coil or conductive pathway, it creates a magnetic field. That magnetic field can attract, repel, rotate, or pull a mechanical part. This basic principle is used in speakers, relays, solenoids, electric motors, vibration motors, precision stages, haptic feedback systems, and many robotic mechanisms.
Traditional electromagnetic actuators are often made from rigid components such as copper coils, permanent magnets, iron cores, bearings, springs, and metal housings. They are reliable and powerful, but they do not naturally feel like muscle. Biological muscle is soft, flexible, stretchable, self-damping, and deeply integrated into the body’s structure. A rigid motor may rotate a joint, but muscle contracts along fibers, distributes force through tissue, and adapts to changing loads.
That is where modern soft robotics enters the room wearing lab goggles. Researchers are now combining magnetic fields, elastomers, liquid metals, flexible coils, compliant structures, and smart materials to create muscle-like electromagnetic actuators. These systems aim to deliver the power and speed of electromagnetic motion while gaining some of the flexibility and safety of biological tissue.
How an Electromagnetic Actuator Can Mimic Muscle
A biological muscle works by contraction. Muscle fibers shorten when activated, creating force through tendons and joints. A good artificial muscle does not necessarily need to copy biology at the molecular level. It needs to reproduce the useful behavior: contraction, extension, stiffness control, repeatable motion, and responsiveness.
In a muscle-inspired electromagnetic actuator, magnetic force often plays the role of “activation.” A current turns on a magnetic field. The field attracts a magnetic element, squeezes an elastic body, pulls a membrane, shifts a soft structure, or creates a snap-through motion. When the current changes or stops, elastic materials can return the actuator to its original shape. This creates a cycle that resembles muscle contraction and relaxation.
Some designs use coils and permanent magnets. Others use magnetic particles embedded in soft polymers. Some use liquid-metal channels as stretchable conductors, allowing the actuator to deform without breaking the electrical pathway. In more advanced systems, elastic tension and magnetic attraction work together, allowing large contraction ratios, quick response, and low-voltage operation. The magic is not only in the magnet; it is in the marriage between electromagnetic force and compliant mechanical design.
Why Engineers Want Artificial Muscles So Badly
Artificial muscle is not just a cool phrase for a science headline. It solves real engineering problems. Traditional motors are excellent for many industrial tasks, but they can be heavy, noisy, mechanically complex, and potentially unsafe in direct contact with people. A robotic arm on a factory line can weld a car with terrifying accuracy, but you probably do not want it helping your grandmother put on a sweater unless it has a much softer personality.
Muscle-like actuators are especially valuable when robots must work near humans or handle unpredictable environments. A soft robotic gripper can pick up fruit, medical samples, or fragile electronics without crushing them. A wearable exosuit can assist walking while staying flexible enough to move with the body. A prosthetic hand can benefit from compact actuation that provides strength without turning the device into a brick with fingers.
Electromagnetic muscle-like actuators also offer advantages in speed and control. Electric signals can be adjusted rapidly, which allows precise timing. Magnetic forces can be generated without requiring pumps, compressors, or bulky fluid systems. In miniature robots, haptic devices, and compact wearables, that compactness can be a serious advantage.
Electromagnetic vs. Other Artificial Muscle Technologies
Artificial muscle research includes several competing and complementary technologies. Pneumatic artificial muscles use air pressure to contract or bend. Hydraulic systems use fluids. Dielectric elastomer actuators deform when an electric field is applied. Shape-memory alloys change shape with temperature. Twisted fibers contract when heated or electrically stimulated. Electrofluidic actuators use fluid movement and electrical activation to create muscle-like behavior.
Electromagnetic actuators stand out because they can respond quickly and produce controllable force. They are already common in electronics and machinery, which gives engineers a strong foundation. However, conventional electromagnetic devices can be bulky and rigid. The newest research tries to keep the benefitsfast response, controllability, and powerwhile removing the drawbacks through soft materials, flexible designs, and miniaturization.
In practice, the winning technology may not be one single actuator. Future robots may use a hybrid approach. A wearable glove might use soft electromagnetic actuators for quick haptic feedback, pneumatic components for larger motion, and sensors for closed-loop control. A robotic insect might combine elastic structures with electromagnetic triggering. A medical device might use magnetic actuation because it can be controlled wirelessly or compactly. The field is less like a boxing match and more like a very nerdy orchestra.
Key Design Goals: Strength, Speed, Efficiency, and Safety
To mimic muscle well, an actuator must do more than move. It must move in a useful way. Engineers often evaluate artificial muscles by several performance metrics: strain, stress, work density, power density, response time, efficiency, durability, controllability, and compliance.
Strain and Contraction Ratio
Strain describes how much an actuator changes shape compared with its original size. Natural muscle can contract significantly, which is why engineers care about contraction ratio. A muscle-like actuator with only tiny movement may still be useful for vibration or precision positioning, but it may not be enough for gripping, crawling, walking, or lifting.
Force and Work Density
Force tells us how hard an actuator can push or pull. Work density measures how much mechanical work can be delivered per unit volume. High work density is crucial for compact robots and wearable systems. Nobody wants a “portable” assistive device that requires a backpack the size of a mini-fridge.
Response Time
Muscles respond quickly. So should artificial muscles. Electromagnetic actuation can be fast because magnetic fields can be created and adjusted rapidly. That makes these actuators promising for haptics, flying micro-robots, dynamic grippers, and systems that need rapid feedback.
Compliance and Safety
Compliance means the actuator can yield, bend, or absorb energy instead of staying rigid. This is important for human-facing robots. A compliant actuator can reduce injury risk, protect delicate objects, and survive collisions better than brittle rigid components.
Real-World Applications of Muscle-Like Electromagnetic Actuators
The most exciting part of this technology is not that it sounds futuristic. It is that practical uses are already visible across robotics, medical devices, consumer electronics, and industrial automation.
Soft Robotic Grippers
Soft grippers need controlled force and gentle contact. A muscle-like actuator can help a gripper wrap around irregular objects instead of forcing everything into the same mechanical handshake. This is useful in food handling, agriculture, warehouse automation, and laboratory robotics.
Wearable Haptic Devices
Haptic technology gives users physical feedback through vibration, pressure, or motion. Flexible electromagnetic actuators can be used in gloves, sleeves, straps, and augmented reality systems to simulate touch or resistance. Imagine feeling a virtual button click, a texture change, or a tool response without holding the real object. That is where haptics becomes more than a phone buzz in your pocket.
Prosthetics and Assistive Devices
Prosthetic limbs and assistive wearables need compact, reliable, and responsive actuation. Muscle-like electromagnetic systems could help create lighter hands, adaptive braces, or powered support devices. The biggest challenge is balancing power, battery life, comfort, cost, and safety. A prosthetic actuator must not only work in a lab demo; it must work on a rainy Tuesday when someone is carrying groceries.
Medical and Surgical Robotics
Medical robots often need small, precise, and gentle movement. Soft or flexible actuators can be helpful in minimally invasive tools, rehabilitation devices, artificial organ models, and patient-safe training systems. Muscle-inspired actuation can also help engineers build devices that better match the behavior of human tissue.
Micro-Robots and Insect-Scale Machines
Small robots have strict weight limits. Traditional motors do not always scale down gracefully. Muscle-like actuators, including electromagnetic and electrostatic designs, can help micro-robots fly, crawl, jump, or squeeze through small spaces. In these systems, every milligram matters, and a compact actuator can make the difference between a robot that flies and a robot that performs a dramatic desk dive.
The Role of Soft Materials
The biggest leap in artificial muscle technology comes from soft materials. Elastomers, hydrogels, flexible polymers, magnetic composites, and liquid metals allow engineers to build actuators that deform like biological tissue. Instead of placing a hard motor at a joint, engineers can distribute actuation throughout a soft body.
Magnetic composites are especially interesting. By embedding magnetic particles into stretchable materials, researchers can create structures that respond to external magnetic fields or built-in electromagnetic systems. These composites may bend, crawl, grip, stiffen, or contract depending on how the material is designed and how the magnetic field is applied.
Liquid-metal conductors add another fascinating piece. A traditional copper wire may fatigue or break when stretched repeatedly. Liquid metal can flow inside soft channels, maintaining conductivity while the surrounding elastomer deforms. This opens the door to soft electromagnetic actuators that are not trapped inside rigid metal geometry.
Challenges Holding the Technology Back
Despite the progress, electromagnetic artificial muscles are not ready to replace every motor tomorrow morning. Several challenges remain.
First, efficiency matters. Generating magnetic fields requires electrical energy, and compact systems can heat up. Heat is a serious issue in wearable devices and soft robots because soft materials often do not dissipate heat as well as metals.
Second, scaling is tricky. A design that works beautifully at a small size may not produce enough force at a larger size. A powerful actuator may become too heavy, too hot, or too expensive for practical use.
Third, control can be complicated. Soft materials deform in nonlinear ways. That means a simple input may not always produce a simple motion. Sensors, feedback loops, and better models are needed to make artificial muscles predictable and reliable.
Fourth, durability is essential. Real muscles perform millions of cycles. Artificial muscles must survive repeated bending, stretching, current flow, magnetic loading, and environmental exposure. A lab prototype that works for a video is impressive; a device that works for years is revolutionary.
Why This Technology Feels So Close to a Breakthrough
Electromagnetic muscle-like actuation is exciting because it sits at the intersection of several maturing fields: soft robotics, flexible electronics, magnetic materials, polymer science, machine learning control, additive manufacturing, and wearable design. Progress in any one of these areas can improve the whole system.
Better materials can increase strain and durability. Smarter control algorithms can make soft actuators easier to command. New manufacturing methods can reduce cost and improve repeatability. Improved batteries can make wearable systems more practical. Sensor integration can give artificial muscles proprioceptionthe robotic equivalent of knowing where their own body parts are.
This is also why the phrase “electromagnetic actuator mimics muscle” is more than a headline. It represents a design philosophy. Instead of asking robots to move like machines, engineers are asking machines to borrow tricks from biology: distributed force, softness, adaptability, contraction, and resilience.
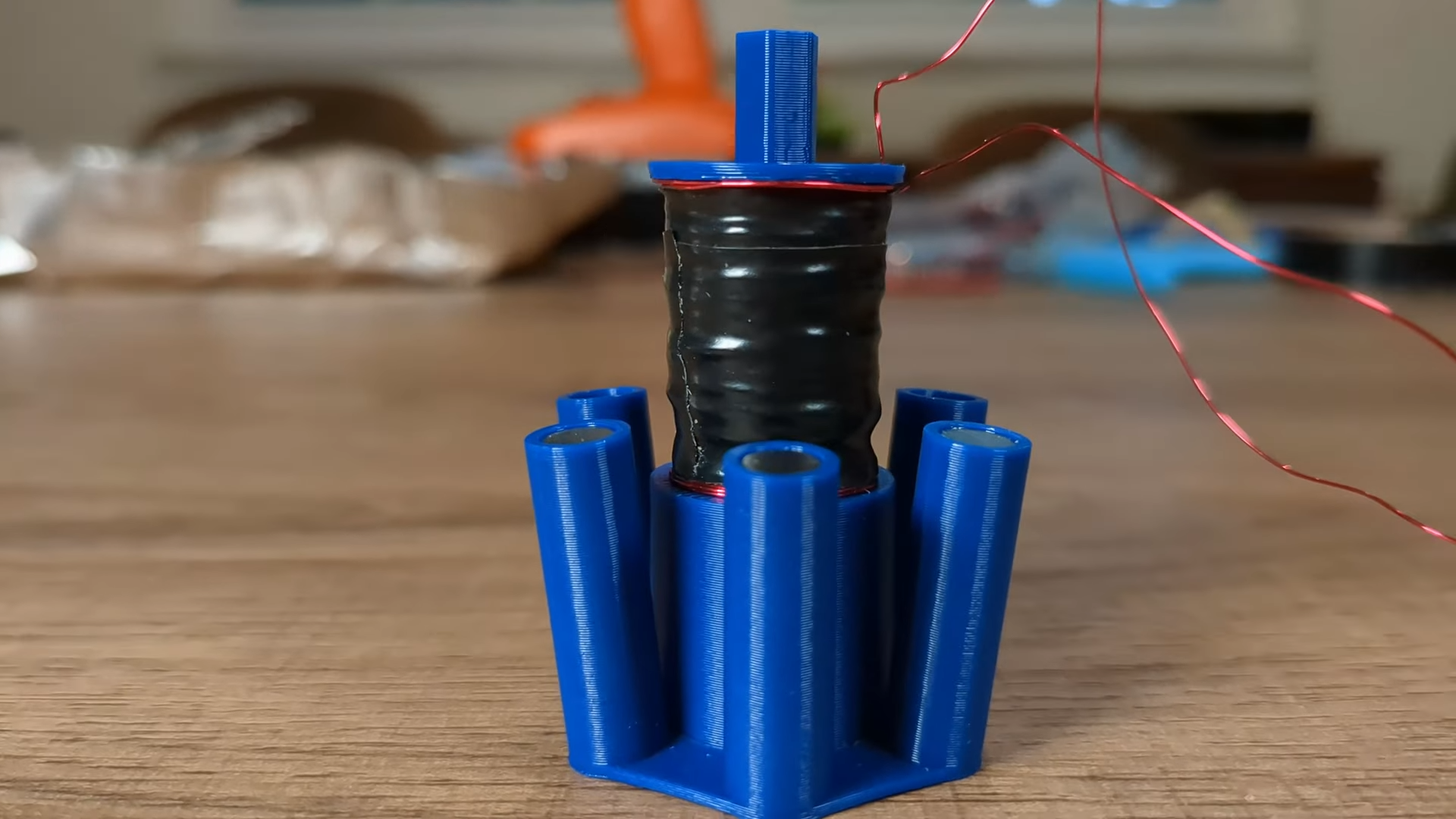
Experience-Based Insights: What It Is Like to Work With Muscle-Like Actuation Concepts
When people first encounter artificial muscle technology, they often imagine something that looks exactly like a human bicep made from silicone and science fiction. Real engineering is usually less theatrical and more interesting. The first lesson is that “muscle-like” does not always mean “human-like.” A great actuator might look like a strip, pouch, coil, membrane, fiber, folded sheet, magnetic elastomer, or tiny vibrating patch. What matters is not whether it looks like anatomy; it is whether it performs a muscle-like function.
In practical prototyping, one of the most important experiences is learning how much the surrounding structure affects performance. An actuator by itself is only half the story. Attach it to a bad frame, and it wastes force. Put it into a clever compliant structure, and the same actuator suddenly looks brilliant. This is similar to biology: muscles need tendons, joints, bones, fascia, and nervous control. In robotics, actuators need mechanical architecture, sensors, power electronics, and software.
Another lesson is that soft systems are wonderfully forgiving and annoyingly unpredictable. A rigid mechanism often behaves like a geometry problem. A soft actuator behaves more like a geometry problem that drank an energy drink and changed its mind. Temperature, material thickness, loading direction, friction, fatigue, and tiny manufacturing differences can all affect motion. That is why testing matters. Engineers may run repeated cycles, measure displacement, track force, monitor heat, and adjust the design until the actuator behaves consistently.
Electromagnetic actuator projects also teach the importance of thermal management. Current produces magnetic fields, but current can also produce heat. In a metal motor housing, heat may be easier to manage. In a soft wearable actuator, heat can become uncomfortable or damaging. Designers must think about duty cycle, insulation, coil resistance, material limits, and user safety. A device that feels impressive for ten seconds but too warm after two minutes is not ready for prime time.
Control is another eye-opening area. With a traditional motor, position control is often straightforward. With a soft electromagnetic muscle, the actuator may stretch, lag, overshoot, or deform differently under load. Adding sensors changes everything. A strain sensor, force sensor, magnetic sensor, or vision-based feedback system can turn a charmingly chaotic prototype into a controllable machine. The future of artificial muscle will depend heavily on closed-loop control, not just stronger materials.
From a design perspective, the most promising experience is watching a soft actuator interact safely with the world. A rigid gripper may need careful programming to avoid crushing an object. A compliant muscle-like gripper can naturally conform to shape and distribute pressure. That physical intelligence is powerful. It means some of the “thinking” is built into the material and structure, not forced entirely into software. In robotics, that can simplify control and improve safety.
For students, builders, and engineers exploring this field, the best mindset is curiosity with discipline. Artificial muscle technology rewards experimentation, but it also demands measurement. Record voltage, current, force, displacement, temperature, response time, and cycle life. Compare designs. Change one variable at a time. And never underestimate how much a small material change can transform performance. In this field, the difference between “floppy noodle” and “future of robotics” can be a few millimeters, a better elastomer, or a smarter magnetic layout.
Conclusion
The electromagnetic actuator that mimics muscle is part of a larger robotics revolution. Engineers are moving beyond rigid machines and toward systems that are softer, safer, faster, and more biologically inspired. By combining magnetic fields with elastic structures, flexible conductors, soft materials, and intelligent control, researchers are creating actuators that can contract, bend, grip, vibrate, and respond in ways that feel increasingly muscle-like.
This technology still has hurdles: energy efficiency, heating, durability, miniaturization, cost, and control. But the direction is clear. Future robots will not all move like factory arms. Some will move like fingers, insects, hearts, tentacles, fabrics, or even tiny bundles of artificial fibers. That is the real promise of muscle-inspired electromagnetic actuation: machines that do not merely move, but move with adaptability.
In short, the robot gym is open. And artificial muscles are finally starting to flex.